|
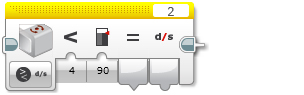
The Gyro Sensor block gets data from the Gyro Sensor. You can measure the rotation rate or rotation angle and get a Numeric output. You can also compare the sensor data to a Threshold Value to get a Logic (True or False) output. See Using the Gyro Sensor for more information about what the Gyro Sensor does, the data that it provides, and programming examples. |