|
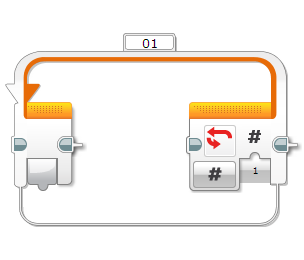
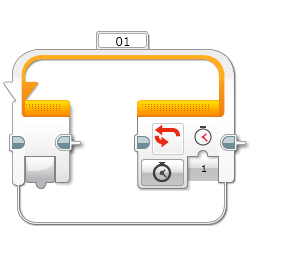
The Loop block is a container that can hold a sequence of programming blocks. It will make the sequence of blocks inside it repeat. You can choose to repeat the blocks forever, a certain number of times, or until a sensor test or other condition is True. Only the blocks inside the loop will repeat. After the loop ends, the program will continue with the blocks that are after the loop. |